Tempo di lettura: 12 minuti, 50 secondi
Che cosa è un motore asincrono trifase?
La macchina asincrona (motore asincrono trifase) è una macchina rotante la cui velocità non è rigidamente legata a quella del campo magnetico rotante (velocità di sincronismo) esistente entro la macchina. E' per questo fatto, cioè appunto perché la velocità di rotazione risulta differente da quella di sincronismo, che tale tipo di macchina è stata denominata asincrona.
Ma la macchina viene anche denominata ad induzione non tanto perché il fenomeno dell'induzione elettromagnetica sia fondamentale (del resto tutte le macchine funzionano sfruttando questo fenomeno) quanto perchè la parte rotante è see esclusivamente di correnti indotte indispensabili per il funzionamento.
L'impiego principale di questa macchina, la quale risulta reversibile, è quello come motore elettrico; dalla macchina asincrona derivano però alcune macchine speciali. Il tipo di motore più diffuso è quello trifase (motore asincrono trifase); il motore monofase costituisce, infatti, un caso particolarissimo, limitato al campo delle piccole potenze. Ciò perchè il funzionamento di questa macchina si basa sul campo magnetico rotante, campo facilmente realizzabile solamente con le correnti polifasi, in particolare e più semplicemente con quelle trifasi.
I motori asincroni trifase sono costruiti per tutte le potenze, fino a decine di migliaia di kW; risultano sempre molto economici e molto robusti, perchè la parte rotante non riceve corrente dall'esterno ed anche perchè può essere costruita in maniera molto semplice.
Come è fatto un motore asincrono trifase?
Il motore asincrono trifase è costituito da una parte fissa e da una parte rotante.
La parte fissa, detta statore, è formata da un pacco di lamierini in Fe-Si aventi la forma di corona circolare. Questa porta, all'interno, delle cave nelle quali trovano posto i conduttori costituenti l'avvolgimento di statore che può essere del tipo bipolare o multipolare, dipendendo ciò dalla velocità di rotazione scelta (velocità di sincronismo).
Tanto la struttura megnetica che i circuiti elettrici dello statore del motore asincrono trifase sono del tutto simili a quelli della macchina sincrona, lo statore è sostenuto, naturalmente, dalla carcassa.
La parte rotante, detta per l'appunto rotore, è interna allo statore e consiste in una struttura cilindrica, costituita anchessa da un pacco di lamierini in FE-Si, all'interno del quale passa l'albero di rotazione e nella cui parte esterna è disposto un certo numero di cave dove trovano posto i conduttori costituenti l'avvolgimento di rotore.
La parte magnetica di rotore risulta laminata, nel senso normale all'asse di rotazione, per ridurre le perdite nel ferro a causa elle correnti parassite, perchè il rotore del motore asincrono trifase, a differenza di quello sincrono, è sede di un flusso magnetico variabile.
Fra statore e rotore, la cui forma è quella cilindrica coassiale, viene di conseguenza a formarsi il traferro il cui spessore, sempre realizzato col minimo valore, garantisce la libera rotazione al rotore.
Il traferro varia, a seconda della potenza del motore asincrono trifase, da frazione di millimetro, per i piccoli motori, a qualche millimetro per i grossi motori.
E' importante osservare come i conduttori che si trovano nelle cave di rotore devono costituire nel loro insieme un avvolgimento polifase avente lo stesso numero di poli che caratterizza il circuito elettrico statorico.
Tipologie di rotore, avvolto o in corto circuito
A questo proposito, il rotore delle macchine asincrone può essere essenzialmente di due tipi differenti, precisamente avvolto (detto anche con collettori ad anelli) oppure in corto circuito.
L'avvolgimento di rotore avvolto si presenta del tutto simile all'avvolgimento di statore. E' dunque un avvolgimento, di solito trifase, il quale, tra l'altro, presenta le fasi collegate a stella o a triangolo e i cui terminali fanno capo a tre anelli (di materiale buon conduttore dell'elettricità, come il bronzo) isolati fra di loro e calettati sull'asse di rotazione.
Su ciascun anello può appoggiare una spazzola per poter permettere la chiusura delle fasi rotoriche sul reostato di avvitamento. In funzionamento normale, però, i tre anelli risultano cortocircuitati allo scopo di determinare la minima resistenza alla circolazione delle correnti di fase.
L'avvolgimento rotorico in corto circuito, che risulta il più diffuso, è detto anche a gabbia di scoiattolo. E' questo un semplicissimo e robustissimo avvolgimento costituito da un solo conduttore per cava, conduttore costituito quindi da una sbarra di rame o alluminio, le cui estremità risultano collegate a due anelli (frontali) di rame o di alluminio.
Mentre le sbarre costituiscono la parte attiva dell'avvolgimento, i due anelli frontali, di piccolissima resistenza ohmica, provvedono a porle in corto circuito, permettendo così la circolazione di una corrente di intensità relativamente forte.
Va osservato che tale tipo di avvolgimento, preso a sé, non presenta un numero di poli be determinato mentre, quando ruota nella macchina in funzione, le correnti indotte circolano nelle sbarre in modo tale da determinare tanti poli quanti sono quelli del campo magnetico rotante (dovuti all'avvolgimento di statore).
Come funziona un motore asincrono trifase?
Il funzionamento del motore asincrono trifase si basa sul fatto che il campo magnetico rotante, generato entro la macchina della terna di correnti circolanti negli avvolgimenti di statore, determina, per induzione, una coppia motrice sulla parte mobile.
Si consideri infatti un caso molto semplice: tre bobine fisse, uguali e aventi gli assi disposti a 120 gradi l'uno dall'altro, all'interno delle quali sia stato posto un cilindro di rame, libero di ruotare attorno al proprio asse.
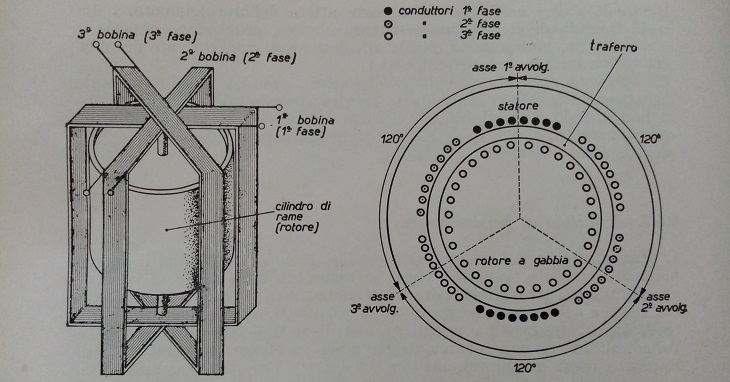
Alimentando le suddette tre bobine con tre correnti alternate, della stessa frequenza e intensità, però sfasate tra di loro di un terzo di periodo, si venga a generare nello spazio interno a dette bobine un campo magnetico rotante il quale farà un giro completo nel tempo in cui si compie un'alternanza completa (periodo) dela corrente di alimentazione (il campo magnetico rotante in oggetto è infatti bipolare).
Ora il cilindro di rame, che è interno alle bobine, sarà sottoposto all'azione del campo magnetico rotante e diventerà perciò sede di correnti indotte , le quali, a causa del campo megnetico, daranno luogo a delle forze di natura elettromagnetica che tenderanno a mettere in movimento il cilindro stesso, per cui, se esse non risulta bloccato o eccessivamente frenato, si porterà a ruotare a quella velocità che consentirà alle correnti indotte di sviluppare la coppia sufficiente per mantenerlo in rotazione.
In sostanza, dunque, il cilindro di rame, cioè il sistema indotto in quanto sede di correnti indotte, ruota per obbedire alla legge di Lenz. Però la sua velocità non potra mai raggiungere la velocità del campo magnetico rotanteperchè in tale caso verrebbe meno il moto relativo tra campo magnetico rotante e sistema indotto e non potrebbero svilupparsi le correnti indotte alla cui alla cui esistenza è dovuto il movimento.
Si comprende ancora che, mentre la velocità del campo magnetico rotante è costante, perchè costante è per ipotesi la frequenza delle correnti di alimetazione, la velocità della parte rotante, cioè del sistema indotto, dipende invece dal valore della coppia frenante che vi agisce: ad esempio, più elevato risulta l'effetto frenante di tale coppia, maggiore dovrà essere lo scarto di velocità del rotore rispetto alla velocità del campo magnetico rotante e ciò può consentire alle correnti indotte un aumento della loro intensità, aumento necessario per sviluppare la maggior coppia motrice richiesta.
Il sistema indotto non può mantenere quindi una velocità rigorosamente costante al variare del carico, ma dovrà accelerare o rallentare (in pratica solo leggermente) in funzione dell'aumento o diminuzione del carico meccanico. La rotazione è dunque asincrona rispetto al campo magnetico rotante.
Quanto è stato detto per il motore bilpolare può essere ripetuto per il motore a più coppie di poli: naturalmente cambierà la velocità del rotore.
Infatti, il valore assunto dalla velocità n0 del campo magnetico rotante, quando questo è dovuto ad un avvolgimento statorico caratterizzato da p coppie di polari e alimentato con correnti trifase di frequenza f, risulta espresso dalla seguente formula:
n0 =60 x (f / p)
la velocità di sincronismo è direttamente proporzionale alla frequenza e inversamente proporzionale al numero delle coppie polari.
E' importante osservare che, quando entro il campo rotante (di velocità n0 ) ruota il rotore, caratterizzato dallo stesso numero di poli e da n giri al minuto (in senso concorde con il campo rotante), la velocità relativa del campo mangetico rotante rispetto al rotore, velocità che si può anche chiamare velocità di scorrimento o slittamento, è data da n0 - n.
Riferendo tale velocità come velocità di sincronismo, cioè esegundo il rapporto (n0 - n) / n0 , si ottiene un paramentro adimensionale molto utile per definire la velocità di scorrimento, paramentro denominato semplicemente scorrimento e indicato con s.
Lo scorrimento rappresenta, dunque, la frazione di giro che il rotore perde per ciascun giro completo del campo magnetico rotante.
Tabella Scorrimento, Rendimento e Fattore di Potenza Del Motore Asincrono Trifase
| Potenza (kW) | 0,1 | 1 | 10 | 100 | 1000 |
| Scorrimento % | 12 | 7 | 3 | 1,5 | 1 |
| Rendimento | 0,63 | 0,75 | 0,86 | 0,93 | 0,96 |
| Fattore di potenza Motore veloce |
0,63 | 0,75 | 0,86 | 0,93 | 0,96 |
| Fattore di potenza Motore lento |
-- | 0,70 | 0,80 | 0,86 | 0,89 |
Avviamento di un motore asincrono trifase
Il motore asincrono trifase è caratterizzato dall'avere, all'avviamento, una coppia non molto elevata e di assorbire invece una corrente di notevole intensità.
La coppia di spunto è relativamente piccola perchè la corrente che percorre i circuiti rotorici risulta fortemente in ritardo sulla forza elettro motrice a causa dell'alto valore, rispetto alla resistenza rotorica, offerto dalla reattanza di dispersione rotirica la quale, all'avviamento, raggiunge il suo valore massimo.
La corrente è d'altronde elevata perchè l'impedenza del circuito rotorico coincidente praticamente con la suddetta reattanza di dispersione, presenta valori relativamente piccoli e, d'altra parte, vi è tutto l'interesse affinché tale reattanza risulti di piccolo valore.
Si comprende quindi come, all'avviamento, sia necessario diminuire l'intensità della corrente, allo scopo di ridurre le cadute di tensione nella linea (e nei trasformatori) di alimentazione e anche per limitare il calore che si produce negli avvolgimenti in tale fase di funzionamento. Nello stesso tempo è opportuno aumentare il valore della coppia di spunto, per ridurre così il tempo di avviamento, durante il quale il motore si trova in un regime transitorio molto gravoso e, soprattutto, anche per poter effettuare l'avviamento sotto carico.