Tempo di lettura: 7 minuti, 50 secondi
CARATTERISTICHE GENERALI DEI MOTORI IDRAULICI
I motori idraulicii svolgono la funzione inversa delle pompe, cioè convertono l’energia idraulica in energia meccanica di tipo rotatorio. Come per le pompe, anche per i motori esiste una ampia gamma di forme e principi costruttivi. Gran parte delle considerazioni costruttive fatte per le pompe volumetriche possono essere riferite anche ai motori volumetrici corrispondenti. Peraltro, le diverse esigenze funzionali richiedono in genere, per il motore, una maggiore simmetria costruttiva rispetto alle pompe in quanto, normalmente, è prevista la possibilità di invertire il senso di rotazione e di utilizzarlo in fase di frenatura (ossia il motore, se trascinato dal carico che deve frenare, si comporta come pompa).
Rendimento volumetrico e portata
Nel caso dei motori la portata smaltita è superiore a quella teorica, perché i trafilamenti si vanno ad aggiungere alla portata che riempie le camere della macchina; il rendimento volumetrico viene definito come rapporto fra la portata teorica e quella effettiva, per cui:
Anche in questo caso i trafilamenti svolgono la funzione di lubrificare le parti in movimento relativo e di refrigerare l’intero motore asportando il calore generato per le inevitabili perdite, e devono essere scaricati direttamente al serbatoio senza generare contropressioni.
Velocità di rotazione
Pochi tipi di motori sono utilizzabili sia a velocità di rotazione molto basse che a quelle superiori a 1000 RPM. Per questo motivo, i motori oleodinamici si classificano in:
• Motori veloci (velocità comprese tra 500 e 10000 RPM);
• Motori lenti (velocità comprese tra 0 e 1000 RPM).
I motori veloci, dal punto di vista costruttivo sono del tutto identici alle pompe già descritte con la semplice inversione del funzionamento: ricevono olio ad alta pressione e lo scaricano a bassa pressione.
I motori lenti detti anche motori LSHT (Low Speed High Torque) oltre a presentare basse velocità di rotazione presentano coppie elevate e sono ideali per tutte quelle applicazioni nelle quali l’utilizzatore richiede un carico notevole e basse velocità; infatti in questi casi un motore veloce, oltre a lavorare male, richiede ingombri e, quindi, costi molto più elevati. Ciò nonostante, è da sottolineare che negli ultimi tempi, per esigenze di questo tipo, si sta affermando la soluzione di utilizzare un motore veloce accoppiato ad un riduttore.
Coppia
La formula esprimente la coppia erogata da un motore oleodinamico è simile a quella di una pompa, ma in questo caso le perdite vanno a ridurre la coppia all’utilizzatore, per cui:
Come si può notare, la coppia erogata da un motore oleodinamico è direttamente proporzionale alla sua cilindrata ed alla differenza di pressione ai suoi attacchi, per cui i motori lenti per esercitare grandi coppie devono avere grandi cilindrate e ciò viene realizzato facendo eseguire ad ogni camere più cicli in un giro dell’albero motore.
Rendimento globale e potenza
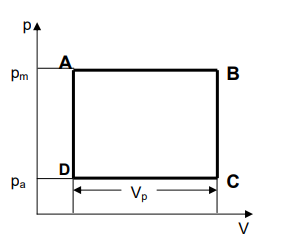
Il ciclo ideale dei motori oleodinamici e identico a quello delle pompe con la semplice inversione del verso di percorrenza che in questo caso diventa orario.
Per cui l’espressione della potenza è simile a quella delle pompe con la semplice inversione dei rendimenti che in questo caso vanno a ridurre la potenza utile:

Il rendimento globale del motore ηM viene, pertanto, definito come il rapporto tra la potenza utile, fornita dal motore, e la potenza idraulica posseduta dal fluido.
TIPOLOGIE COSTRUTTIVE E PRINCIPI DI FUNZIONAMENTO DEI MOTORI IDRAULICI
Come già sottolineato, i motori veloci sono del tutto simili alle corrispondenti pompe per cui qui di seguito ci si soffermerà velocemente sulla descrizione dei soli motori lenti.
Motori a pistoni radiali multicorsa
In un motore a pistoni radiali multicorsa, lo statore è costituito da una pista a camme su cui appoggiano tramite rulli i pistoni, per ogni giro dell’albero motore ciascun cilindro viene riempito e vuotato un numero di volte pari al numero di camme esistenti sulla pista.
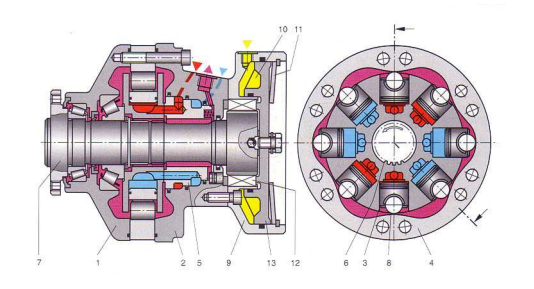
In questi motori notevole complessità assume il sistema di distribuzione che deve essere in grado di collegare il vano interno a ciascun cilindro con l’ammissione in fase di discesa del pistone e con lo scarico in fase di risalita.
Nell’esempio in esame, ciò è realizzato tramite un anello fisso che presenta una serie di condottini disposti in direzione assiale, di questi una metà (pari al numero delle camme) è posta in comunicazione con condotto toroidale in comunicazione con l’ammissione e l’altra metà con un condotto toroidale collegato allo scarico. Il rotore, all’interno del quale sono realizzati i cilindri in cui alloggiano i corrispondenti pistoni, presenta, per ciascun cilindro, un condottino disposto anch’esso in direzione assiale e collegato al cilindro stesso. Questo condotto, a causa della rotazione del rotore, viene in contatto, alternativamente, con i condotti fissi di alta e bassa pressione. La difficoltà di ottenere una buona tenuta tra l’anello fisso della distribuzione ed il rotore è notevole.
Motori a pistoni assiali multicorsa
La versione multicorsa di questi motori presenta, al posto del piatto inclinato, un disco che è disposto perpendicolarmente all’asse di rotazione. Il moto alternativo dei pistoni è dovuto al profilo ondulato che questo disco presenta in direzione circonferenziale; coerentemente con la disposizione assiale dei pistoni, le camme portate dal disco hanno uno sviluppo assiale.
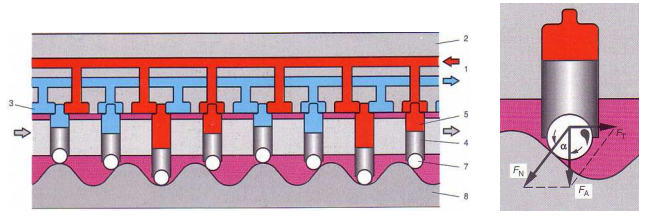
Lo schema concettuale di funzionamento è mostrato nella figura superiore dove è riportato lo sviluppo in piano di una sezione cilindrica: il distributore, solidale con il disco che porta le camme, contiene condotti di alta e bassa pressione, mentre il corpo mobile, che contiene i cilindri ed i relativi pistoni, nel suo movimento mette in contatto questi ultimi con l’alta o la bassa pressione a seconda che il pistone stia scendendo o risalendo.
Nella figura a destra è illustrato il meccanismo secondo il quale la forza assiale dovuta alla pressione dell’olio genera una forza tangenziale responsabile della coppia motrice.
CONCLUSIONI
Prima di concludere la trattazione dei motori idraulici, si vuol sottolineare la capacità dei motori idraulici di sviluppare una notevole coppia di spunto capace di vincere la coppia resistente e di avviare il sistema sotto carico senza l’utilizzo di frizioni.
Solo i motori a palette fanno eccezione in quanto all’avviamento, per l'iniziale assenza delle forze centrifughe, le palette non riescono ad aderire sufficientemente ai fianchi dello statore per fare una adeguata tenuta, conseguentemente la coppia di avviamento si riduce notevolmente. Inoltre è da sottolineare che, nelle unità a cilindrata variabile, un eventuale regolatore di portata deve intervenire aumentando la cilindrata se aumenta la pressione e viceversa, contrariamente a quanto precedentemente visto per le pompe.